#include "Servo.h"
/////////////////BLDC Motor/////////////////
#define MAX_THROTTLE 180
#define MIN_THROTTLE 0
#define MAX_PWM 150
#define MIN_PWM 0
#define MOTOR1 6 //motor pin number
#define MOTOR2 7 //motor pin number
#define MOTOR3 44 //motor pin number
#define MOTOR4 45 //motor pin number
int motor1Power, motor3Power; // Motors on the X axis
//=>; changing their speeds will affect the pitch
int motor2Power, motor4Power; // Motors on the Y axis
//=>; changing their speeds will affect the roll
Servo motor1;
Servo motor2;
Servo motor3;
Servo motor4;
////////////////////////////////////////////
/////////////////IMU Sensor/////////////////
typedef union {
signed short value;
unsigned char byte[2];
} S2BYTE;
S2BYTE data_word;
unsigned char SBuf[100];
int SCnt = 0;
double DegRoll, DegPitch, DegYaw;
////////////////////////////////////////////
/////////////////PID Conrtroll/////////////////
#define MINhover 0
#define INIThover 20
#define INITROLLKp 0.48//0.19//0.29
#define INITROLLKi 0.000850//0.000850//0.000287
#define INITROLLKd 33
#define INITPITCHKp 0.29
#define INITPITCHKi 0.000287
#define INITPITCHKd 33
#define INITYAWKp 0.29
#define INITYAWKi 0.000287
#define INITYAWKd 33
#define MAXSPEED 3
#define MINSPEED 100
#define INITROLLSETPOINT -0.60
#define INITPITCHSETPOINT -0.67
double roll_setpoint = INITROLLSETPOINT, pitch_setpoint = INITPITCHSETPOINT, yaw_setpoint = 0;
int hover = INIThover;
double roll_Kp = INITROLLKp, roll_Ki = INITROLLKi, roll_Kd = INITROLLKd;
double pitch_Kp = INITPITCHKp, pitch_Ki = INITPITCHKi, pitch_Kd = INITPITCHKd;
double yaw_Kp = INITYAWKp, yaw_Ki = INITYAWKi, yaw_Kd = INITYAWKd;
double roll_p, roll_i, roll_d, roll_val;
double pitch_p, pitch_i, pitch_d, pitch_val;
double yaw_p, yaw_i, yaw_d, yaw_val;
int rollControll, pitchControll, yawControll;
int initial = 0;
////////////////////////////////////////////
/////////////////Serial Monitor/////////////////
int Serial_print_sig = 1;
int roll_print = 1, pitch_print = 0, yaw_print = 0, hover_print = 0;
////////////////////////////////////////////
////////////////Wireless Controller///////////////////
#define CH1 2 // yaw
#define CH2 3 //pitch
#define CH3 0 //hover
#define CH4 1 //roll
#define CH1_MIN 1292//200 1264
#define CH1_MID 1464
#define CH1_MAX 1632//168
#define CH2_MIN 1224//304 1176
#define CH2_MID 1480
#define CH2_MAX 1736//256
#define CH3_MIN 1028
#define CH3_MID 1448
#define CH3_MAX 1808
#define CH4_MIN 1296//208 1264
#define CH4_MID 1472
#define CH4_MAX 1648//176
#define CUTFORZERO 3
#define DEGRANGE 45
#define TROTTLERANGE 150
#define WFLYOFFSET 18
#define CHENELNUM 4
#define CHECKINGNUM 4
volatile int CH1_prev_time, CH1_pwm_value;
volatile int CH2_prev_time, CH2_pwm_value;
volatile int CH3_prev_time, CH3_pwm_value;
volatile int CH4_prev_time, CH4_pwm_value;
int CH1_val = 0, CH2_val = 0, CH3_val = 0, CH4_val = 0;
int controll_val[CHENELNUM];
int* ptr;
/////////////////////////////////////////////////////////////////////
//---------------------------------------------------------------------//
//
// funtions
//
//--------------------------------------------------------------------//
//----------------------------------------------------------------//
// BLDC Motor
//---------------------------------------------------------------//
//esc占쏙옙占쏙옙 占싹깍옙
void callibration(void)
{
Serial.println("Calibrate ESC? 'y' or 'n'.");
while (!Serial.available());
char cali = Serial.read();
if (cali == 'y'){
Serial.println("send max throttle");
motor1.attach(MOTOR1);
motor2.attach(MOTOR2);
motor3.attach(MOTOR3);
motor4.attach(MOTOR4);
motor1.write(MAX_THROTTLE);
motor2.write(MAX_THROTTLE);
motor3.write(MAX_THROTTLE);
motor4.write(MAX_THROTTLE);
delay(5000);
Serial.println("send min throttle");
motor1.attach(MOTOR1);
motor2.attach(MOTOR2);
motor3.attach(MOTOR3);
motor4.attach(MOTOR4);
motor1.write(MIN_THROTTLE);
motor2.write(MIN_THROTTLE);
motor3.write(MIN_THROTTLE);
motor4.write(MIN_THROTTLE);
delay(2000);
Serial.println("callibration complete");
}
else if (cali == 'n'){
motor1.attach(MOTOR1);
motor2.attach(MOTOR2);
motor3.attach(MOTOR3);
motor4.attach(MOTOR4);
motor1.write(MIN_THROTTLE);
motor2.write(MIN_THROTTLE);
motor3.write(MIN_THROTTLE);
motor4.write(MIN_THROTTLE);
}
Serial.println("If you want Program keep going. Press any key.");
while (!Serial.available());
}
int motorBegin(void)
{
int count = 0, throttle;
motor1.attach(MOTOR1);
motor2.attach(MOTOR2);
motor3.attach(MOTOR3);
motor4.attach(MOTOR4);
delay(2000);
while (count <5){
vlaueable_wfly(&controll_val[0]);
throttle = controll_val[2];
count++;
}
do{
vlaueable_wfly(&controll_val[0]);
throttle = controll_val[2];
if (throttle < 10){//no callibration
Serial.println("no callibration.");
motor1.write(MIN_THROTTLE);
motor2.write(MIN_THROTTLE);
motor3.write(MIN_THROTTLE);
motor4.write(MIN_THROTTLE);
delay(2000);
Serial.println("program start!");
delay(2000);
return 0;
}
else if (throttle > 140){//yes callibration
Serial.print("you send MAX_THROTTLE. "); Serial.print("callibration begin. "); Serial.println("wait 4 seconds");
motor1.write(MAX_THROTTLE);
motor2.write(MAX_THROTTLE);
motor3.write(MAX_THROTTLE);
motor4.write(MAX_THROTTLE);
delay(4000);
Serial.println("send min throttle for caliibraion.");
while (throttle > 10){//wait until MIN_THROTTLE
vlaueable_wfly(&controll_val[0]);
throttle = controll_val[2];
}
Serial.print("you send MIN_THROTTLE. ");
motor1.write(MIN_THROTTLE);
motor2.write(MIN_THROTTLE);
motor3.write(MIN_THROTTLE);
motor4.write(MIN_THROTTLE);
Serial.print("calibration complete. ");
Serial.println("program start!");
delay(2000);
return 1;
}
} while (1);
}
//占쏙옙占쏘값占쏙옙 占쌨어서 占쏙옙占쏙옙 占쏙옙占쏙옙
void run_motors(int throttle, int rollOffset, int pitchOffset, int yawOffset)
{
//emergency
if (controll_val[0] > 30 || throttle < 5){
throttle = 0;
rollOffset = 0;
pitchOffset= 0;
yawOffset = 0;
}
//Roll control
motor1Power = throttle + rollOffset / 2;
motor2Power = throttle + rollOffset / 2;
motor4Power = throttle - rollOffset / 2;
motor3Power = throttle - rollOffset / 2;
//Pitch control
motor4Power = motor4Power + pitchOffset / 2;
motor1Power = motor1Power + pitchOffset / 2;
motor3Power = motor3Power - pitchOffset / 2;
motor2Power = motor2Power - pitchOffset / 2;
/* //yaw control
motor1Power = motor1Power - yawOffset;
motor3Power = motor3Power - yawOffset;
motor2Power = motor2Power + yawOffset;
motor4Power = motor4Power + yawOffset;
*/
limit_max_min(&motor1Power);
limit_max_min(&motor2Power);
limit_max_min(&motor3Power);
limit_max_min(&motor4Power);
motor1.write(motor1Power); motor3.write(motor3Power);
motor2.write(motor2Power); motor4.write(motor4Power);
/*
Serial.print(motor1Power); Serial.print(", ");
Serial.print(motor2Power); Serial.print(", ");
Serial.print(motor3Power); Serial.print(", ");
Serial.print(motor4Power); Serial.println(" ");
*/
}
void limit_max_min(int* pwm)//modify
{
if (*pwm>MAX_PWM)
*pwm = MAX_PWM;
else if (*pwm<MIN_PWM)
*pwm = MIN_PWM;
}
//---------------------------------------------------------//
// IMU Sensor
//--------------------------------------------------------//
//占쏙옙占쏙옙占쏙옙占쏙옙 占싻어서 roll,pitch,yaw 占쏙옙占쏙옙 占싯아놂옙占쏙옙.
int recieve_data(void)
{
static int step_ = 0, check_all_recieve = 0;
unsigned char data1byte;
int n;
data1byte = Serial1.read();
switch (step_)
{
case 0:
if (data1byte == 0x55) { step_ = 1, check_all_recieve = 0; }
break;
case 1:
if (data1byte == 0x55) { step_ = 2; SCnt = 0; }
else step_ = 0;
break;
case 2:
SBuf[SCnt++] = (unsigned char)data1byte;
if (SCnt == 8) // roll(2byte),pitch(2byte),yaw(2byte),checksum(2byte)
{
step_ = 0;
SCnt = 0;
check_all_recieve = 1;
}
break;
default:
break;
}
return check_all_recieve;
}
static int trans_data_to_degree(unsigned char *sdata) // sdata : roll(2)+pitch(2)+yaw(2)+chk(2)
{
int n;
unsigned short chk = 0;
///////////// checksum /////////////////
chk = 0x55 + 0x55;
for (n = 0; n<6; n++) chk += sdata[n];
if (chk != get_data_word(&sdata[6]))
{
Serial.print("checksum error!");
return 0; //
}
////////////////////////////////////////
DegRoll = get_data_word(&sdata[0]) / 100.;
DegPitch = get_data_word(&sdata[2]) / 100. * -1;
DegYaw = get_data_word(&sdata[4]) / 100.;
return 1;
}
static signed short get_data_word(unsigned char *dat)
{
// little endian..
data_word.byte[0] = dat[1];
data_word.byte[1] = dat[0];
return data_word.value;
}
//-----------------------------------------------------------//
// PID Conrtroll
//----------------------------------------------------------//
//占쏙옙占쏙옙 占쏙옙占쏙옙 占쌨아쇽옙 PID占쏙옙占쏘값 占쏙옙占?double roll_pid(double setpoint, double degree)
{
double val_out;
static double roll_p_err_prv, roll_p_err, roll_i_err, roll_d_err;
roll_p_err = setpoint - degree;
roll_i_err += roll_p_err;
roll_d_err = roll_p_err - roll_p_err_prv;
roll_p_err_prv = roll_p_err;
val_out = (roll_Kp*roll_p_err) + (roll_Ki*roll_i_err) + (roll_Kd*roll_d_err);
roll_p = roll_Kp*roll_p_err;
roll_i = roll_Ki*roll_i_err;
roll_d = roll_Kd*roll_d_err;
roll_val = val_out;
return val_out;
}
double pitch_pid(double setpoint, double degree)
{
double val_out;
static double pitch_p_err_prv, pitch_p_err, pitch_i_err, pitch_d_err;
pitch_p_err = setpoint - degree;
pitch_i_err += pitch_p_err;
pitch_d_err = pitch_p_err - pitch_p_err_prv;
pitch_p_err_prv = pitch_p_err;
val_out = (pitch_Kp*pitch_p_err) + (pitch_Ki*pitch_i_err) + (pitch_Kd*pitch_d_err);
pitch_p = pitch_Kp*pitch_p_err;
pitch_i = pitch_Ki*pitch_i_err;
pitch_d = pitch_Kd*pitch_d_err;
pitch_val = val_out;
return val_out;
}
double yaw_pid(double setpoint, double degree)
{
double val_out;
static double yaw_p_err_prv, yaw_p_err, yaw_i_err, yaw_d_err;
yaw_p_err = setpoint - degree;
yaw_i_err += yaw_p_err;
yaw_d_err = yaw_p_err - yaw_p_err_prv;
yaw_p_err_prv = yaw_p_err;
val_out = (yaw_Kp*yaw_p_err) + (yaw_Ki*yaw_i_err) + (yaw_Kd*yaw_d_err);
yaw_p = yaw_Kp*yaw_p_err;
yaw_i = yaw_Ki*yaw_i_err;
yaw_d = yaw_Kd*yaw_d_err;
yaw_val = val_out;
return val_out;
}
//---------------------------------------------------------//
// Serial Monitor
//----------------------------------------------------------//
void from_computer(void)
{
char c = Serial.read();
//roll debuging
if (c == 'q'){
roll_Kp += 0.01;
Serial.print("roll_Kp = "); Serial.println(roll_Kp);
}
else if (c == 'w'){
roll_Kp -= 0.01;
Serial.print("roll_Kp = "); Serial.println(roll_Kp);
}
else if (c == 'e'){
roll_Kp = INITROLLKp;
Serial.print("roll_Kp = "); Serial.println(roll_Kp);
}
else if (c == 'a'){
roll_Ki += 0.000001;
Serial.print("roll_Ki = "); Serial.println(roll_Ki * 10000);
}
else if (c == 's'){
roll_Ki -= 0.000001;
Serial.print("roll_Ki = "); Serial.println(roll_Ki * 10000);
}
else if (c == 'd'){
roll_Ki = INITROLLKi;
Serial.print("roll_Ki = "); Serial.println(roll_Ki * 10000);
}
else if (c == 'z'){
roll_Kd += 1;
Serial.print("roll_Kd = "); Serial.println(roll_Kd);
}
else if (c == 'x'){
roll_Kd -= 1;
Serial.print("roll_Kd = "); Serial.println(roll_Kd);
}
else if (c == 'c'){
roll_Kd = INITROLLKd;
Serial.print("roll_Kd = "); Serial.println(roll_Kd);
}
//pitch debuging
else if (c == 'r'){
pitch_Kp += 0.01;
Serial.print("pitch_Kp = "); Serial.println(pitch_Kp);
}
else if (c == 't'){
pitch_Kp -= 0.01;
Serial.print("pitch_Kp = "); Serial.println(pitch_Kp);
}
else if (c == 'y'){
pitch_Kp = INITPITCHKp;
Serial.print("pitch_Kp = "); Serial.println(pitch_Kp);
}
else if (c == 'f'){
pitch_Ki += 0.000001;
Serial.print("pitch_Ki = "); Serial.println(pitch_Ki * 10000);
}
else if (c == 'g'){
pitch_Ki -= 0.000001;
Serial.print("pitch_Ki = "); Serial.println(pitch_Ki * 10000);
}
else if (c == 'h'){
pitch_Ki = INITPITCHKi;
Serial.print("pitch_Ki = "); Serial.println(pitch_Ki * 10000);
}
else if (c == 'v'){
pitch_Kd += 1;
Serial.print("pitch_Kd = "); Serial.println(pitch_Kd);
}
else if (c == 'b'){
pitch_Kd -= 1;
Serial.print("pitch_Kd = "); Serial.println(pitch_Kd);
}
else if (c == 'n'){
pitch_Kd = INITPITCHKd;
Serial.print("pitch_Kd = "); Serial.println(pitch_Kd);
}
//yaw debuging
else if (c == 'u'){
yaw_Kp += 0.01;
Serial.print("yaw_Kp = "); Serial.println(yaw_Kp);
}
else if (c == 'i'){
yaw_Kp -= 0.01;
Serial.print("yaw_Kp = "); Serial.println(yaw_Kp);
}
else if (c == 'o'){
yaw_Kp = INITYAWKp;
Serial.print("yaw_Kp = "); Serial.println(yaw_Kp);
}
else if (c == 'j'){
yaw_Ki += 0.000001;
Serial.print("yaw_Ki = "); Serial.println(yaw_Ki * 10000);
}
else if (c == 'k'){
yaw_Ki -= 0.000001;
Serial.print("yaw_Ki = "); Serial.println(yaw_Ki * 10000);
}
else if (c == 'l'){
yaw_Ki = INITYAWKi;
Serial.print("yaw_Ki = "); Serial.println(yaw_Ki * 10000);
}
else if (c == 'm'){
yaw_Kd += 1;
Serial.print("yaw_Kd = "); Serial.println(yaw_Kd);
}
else if (c == ','){
yaw_Kd -= 1;
Serial.print("yaw_Kd = "); Serial.println(yaw_Kd);
}
else if (c == '.'){
yaw_Kd = INITYAWKd;
Serial.print("yaw_Kd = "); Serial.println(yaw_Kd);
}
else if (c == 'p'){
Serial_print_sig = !(Serial_print_sig);
}
else if (c == '/'){
roll_print = !(roll_print);
}
else if (c == '*'){
pitch_print = !(pitch_print);
}
else if (c == '-'){
yaw_print = !(yaw_print);
}
else if (c == '+'){
hover_print = !(hover_print);
}
}
void Serial_Monitor(void)
{
if (Serial_print_sig == 1){
if (roll_print == 1){
Serial.print("Roll=> "); Serial.print(DegRoll); Serial.print(", "); Serial.print(roll_p); Serial.print(", "); Serial.print(roll_i); Serial.print(", "); Serial.print(roll_d); Serial.print(", "); Serial.print(roll_val); Serial.print(", "); Serial.print(motor2Power); Serial.print(", "); Serial.println(motor4Power);
}
else if (pitch_print == 1){
Serial.print("Pitch=> "); Serial.print(DegPitch); Serial.print(", "); Serial.print(pitch_p); Serial.print(", "); Serial.print(pitch_i); Serial.print(", "); Serial.print(pitch_d); Serial.print(", "); Serial.print(pitch_val); Serial.print(", "); Serial.print(motor1Power); Serial.print(", "); Serial.println(motor3Power);
}
else if (yaw_print == 1){
Serial.print("Yaw=> "); Serial.print(DegYaw); Serial.print(", "); Serial.print(yaw_p); Serial.print(", "); Serial.print(yaw_i); Serial.print(", "); Serial.print(yaw_d); Serial.print(", "); Serial.println(yaw_val);
}
}
if (Serial_print_sig == 0){
if (hover_print == 1){
Serial.print("hover = "); Serial.println(hover);
hover_print = 0;
}
else if (roll_print == 1){
Serial.print("roll_Kp = "); Serial.print(roll_Kp); Serial.print(", roll_Ki = "); Serial.print(roll_Ki * 10000); Serial.print(", roll_Kd = "); Serial.println(roll_Kd);
roll_print = 0;
}
else if (pitch_print == 1){
Serial.print("pitch_Kp = "); Serial.print(pitch_Kp); Serial.print(", pitch_Ki = "); Serial.print(pitch_Ki * 10000); Serial.print(", pitch_Kd = "); Serial.println(pitch_Kd);
pitch_print = 0;
}
else if (yaw_print == 1){
Serial.print("yaw_Kp = "); Serial.print(yaw_Kp); Serial.print(", yaw_Ki = "); Serial.print(yaw_Ki * 10000); Serial.print(", yaw_Kd = "); Serial.println(yaw_Kd);
yaw_print = 0;
}
}
}
//-----------------------------------------------------------------//
// Wireless Controller
//-----------------------------------------------------------------//
void wirelessControllerBegin()
{
attachInterrupt(CH1, rising1, RISING);
attachInterrupt(CH2, rising2, RISING);
attachInterrupt(CH3, rising3, RISING);
attachInterrupt(CH4, rising4, RISING);
}
void rising1()
{
attachInterrupt(CH1, falling1, FALLING);
CH1_prev_time = micros();
}
void falling1()
{
attachInterrupt(CH1, rising1, RISING);
CH1_pwm_value = micros() - CH1_prev_time;
}
void rising2()
{
attachInterrupt(CH2, falling2, FALLING);
CH2_prev_time = micros();
}
void falling2()
{
attachInterrupt(CH2, rising2, RISING);
CH2_pwm_value = micros() - CH2_prev_time;
}
void rising3()
{
attachInterrupt(CH3, falling3, FALLING);
CH3_prev_time = micros();
}
void falling3()
{
attachInterrupt(CH3, rising3, RISING);
CH3_pwm_value = micros() - CH3_prev_time;
}
void rising4()
{
attachInterrupt(CH4, falling4, FALLING);
CH4_prev_time = micros();
}
void falling4()
{
attachInterrupt(CH4, rising4, RISING);
CH4_pwm_value = micros() - CH4_prev_time;
}
void vlaueable_wfly(int* storage)
{
int temp_storage[4];
//---------------CH1------------------------
if (CH1_pwm_value>CH1_val + WFLYOFFSET | CH1_pwm_value<CH1_val - WFLYOFFSET)
CH1_val = CH1_pwm_value;
temp_storage[0] = map(CH1_val, CH1_MIN, CH1_MAX, (DEGRANGE*-1), DEGRANGE);
catch_jumping_error(&temp_storage[0], &storage[0], CH1);
if (storage[0] >= (CUTFORZERO*-1) & storage[0] <= CUTFORZERO)
storage[0] = 0;
//----------------CH2----------------------
if (CH2_pwm_value>CH2_val + WFLYOFFSET | CH2_pwm_value<CH2_val - WFLYOFFSET)
CH2_val = CH2_pwm_value;
temp_storage[1] = -1 * map(CH2_val, CH2_MIN, CH2_MAX, (DEGRANGE*-1), DEGRANGE);
catch_jumping_error(&temp_storage[1], &storage[1], CH2);
if (storage[1] >= (CUTFORZERO*-1) & storage[1] <= CUTFORZERO)
storage[1] = 0;
//----------------CH3----------------------
if (CH3_pwm_value>CH3_val + WFLYOFFSET | CH3_pwm_value<CH3_val - WFLYOFFSET)
CH3_val = CH3_pwm_value;
temp_storage[2] = map(CH3_val, CH3_MIN, CH3_MAX, 0, TROTTLERANGE);
catch_jumping_error(&temp_storage[2], &storage[2], CH3);
//-----------------CH4----------------------
if (CH4_pwm_value>CH4_val + WFLYOFFSET | CH4_pwm_value<CH4_val - WFLYOFFSET)
CH4_val = CH4_pwm_value;
temp_storage[3] = -1 * map(CH4_val, CH4_MIN, CH4_MAX, (DEGRANGE*-1), DEGRANGE);
catch_jumping_error(&temp_storage[3], &storage[3], CH4);
if (storage[3] >= (CUTFORZERO*-1) & storage[3] <= CUTFORZERO)
storage[3] = 0;
/*
Serial.print(controll_val[0]);Serial.print(", ");
Serial.print(controll_val[1]);Serial.print(", ");
Serial.print(controll_val[2]);Serial.print(", ");
Serial.print(controll_val[3]);Serial.print(", ");
Serial.println("");
*/
}
void catch_jumping_error(int * temp_val, int * val, int ch_num)
{
static int checkArray[CHENELNUM][CHECKINGNUM];
int sum = 0;
checkArray[ch_num][0] = *temp_val;
//equal??
for (int i = 0; i<CHECKINGNUM; i++)
sum += checkArray[ch_num][i];
if (*temp_val == sum / CHECKINGNUM)
*val = *temp_val;
//shift
for (int i = CHECKINGNUM - 1; i >= 0; i--)
checkArray[ch_num][i + 1] = checkArray[ch_num][i];
}
//---------------------------------------------------------------------//
//
// main
//
//--------------------------------------------------------------------//
void setup() {
Serial.begin(115200);
Serial1.begin(115200);
//callibration();
wirelessControllerBegin();
motorBegin();
}
void loop() {
if (Serial1.available()) //占쏙옙占쏙옙占쏙옙 占쌨깍옙.
{
if (recieve_data() == 1){ //占쏙옙占쏙옙占쏙옙 占쏙옙 占쏙옙占쏙옙?
vlaueable_wfly(&controll_val[0]); //占쏙옙占쏙옙占쏙옙
if (trans_data_to_degree(SBuf) == 1) //占쏙옙占쏙옙占쏙옙.
{
if (initial == 0){
yaw_setpoint = DegYaw;
initial = 1;
//Serial.println(yaw_setpoint);
}
//PID
rollControll = roll_pid(controll_val[3], DegRoll);
pitchControll = pitch_pid(controll_val[1], DegPitch);
yawControll = yaw_pid(yaw_setpoint, DegYaw);
//Run motor
run_motors(controll_val[2], rollControll, pitchControll, yawControll);
if (Serial.available()){ //占쏙옙占쏙옙韜占?
from_computer(); //占쌉력받깍옙.
}
Serial_Monitor(); //Debugging
}
}
}
}








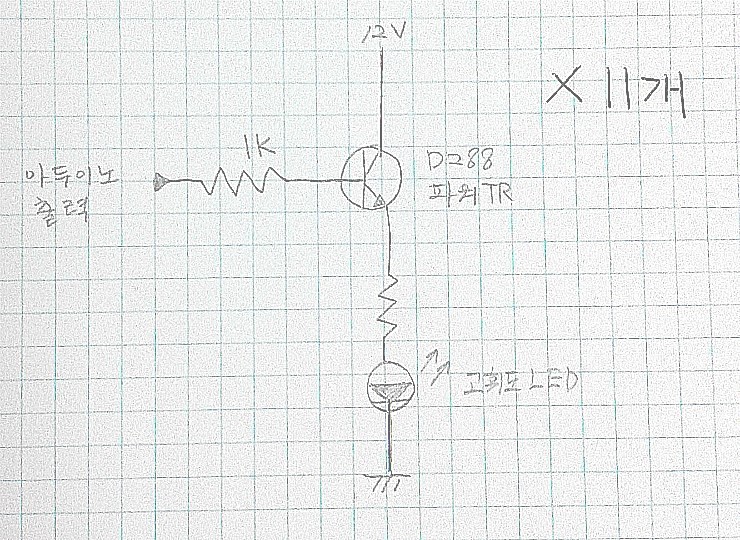

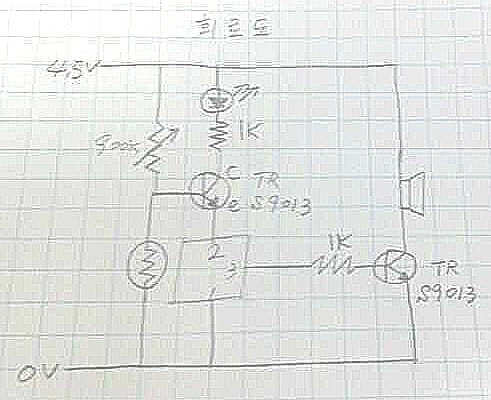
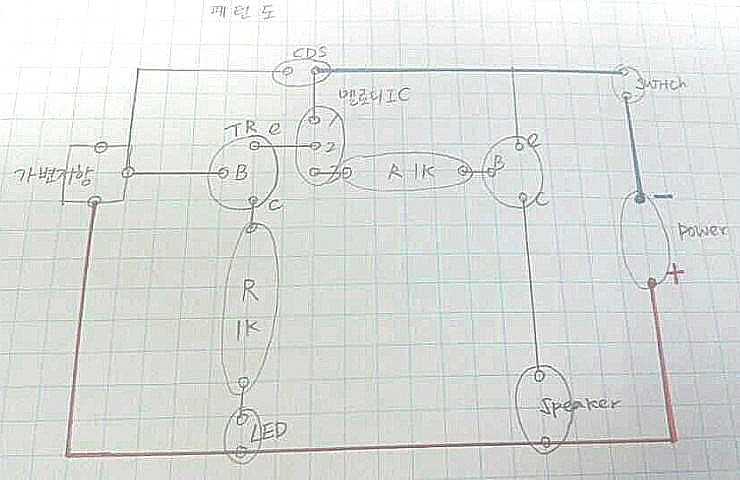

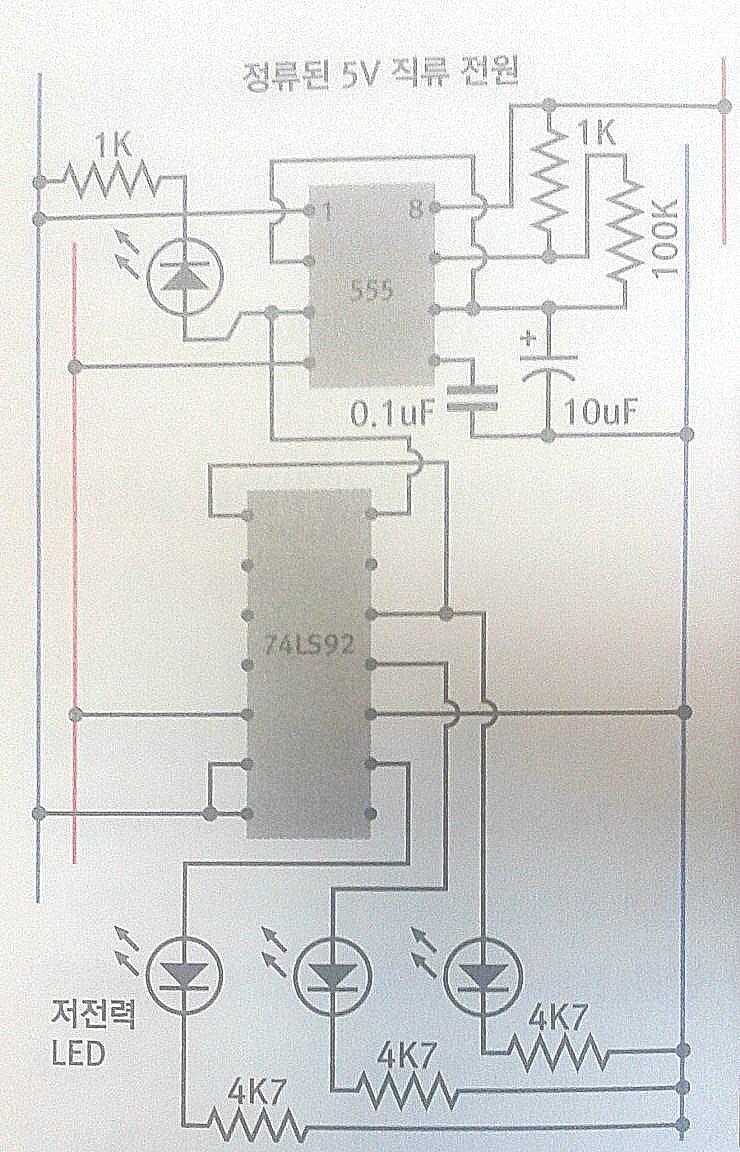




 회로도.pdf
회로도.pdf








